In this tutorial, I will show you a simple project about an Obstacle Avoiding Robot. Robotics is so much interesting and fast-growing field. In the field of engineering science, the applications of robotics are increasing with technology.
There are many types of robotic technology like AI-based, self-controlling, and humanoid controlled. An Obstacle Avoiding Robot is a type of self-controlling autonomous robot that can avoid collisions with unexpected obstacles.
It is a non-microcontroller-based robot that uses IR proximity sensors to avoid collisions.
Must Read Obstacle Avoiding Line Follower Robot Using Arduino
Project

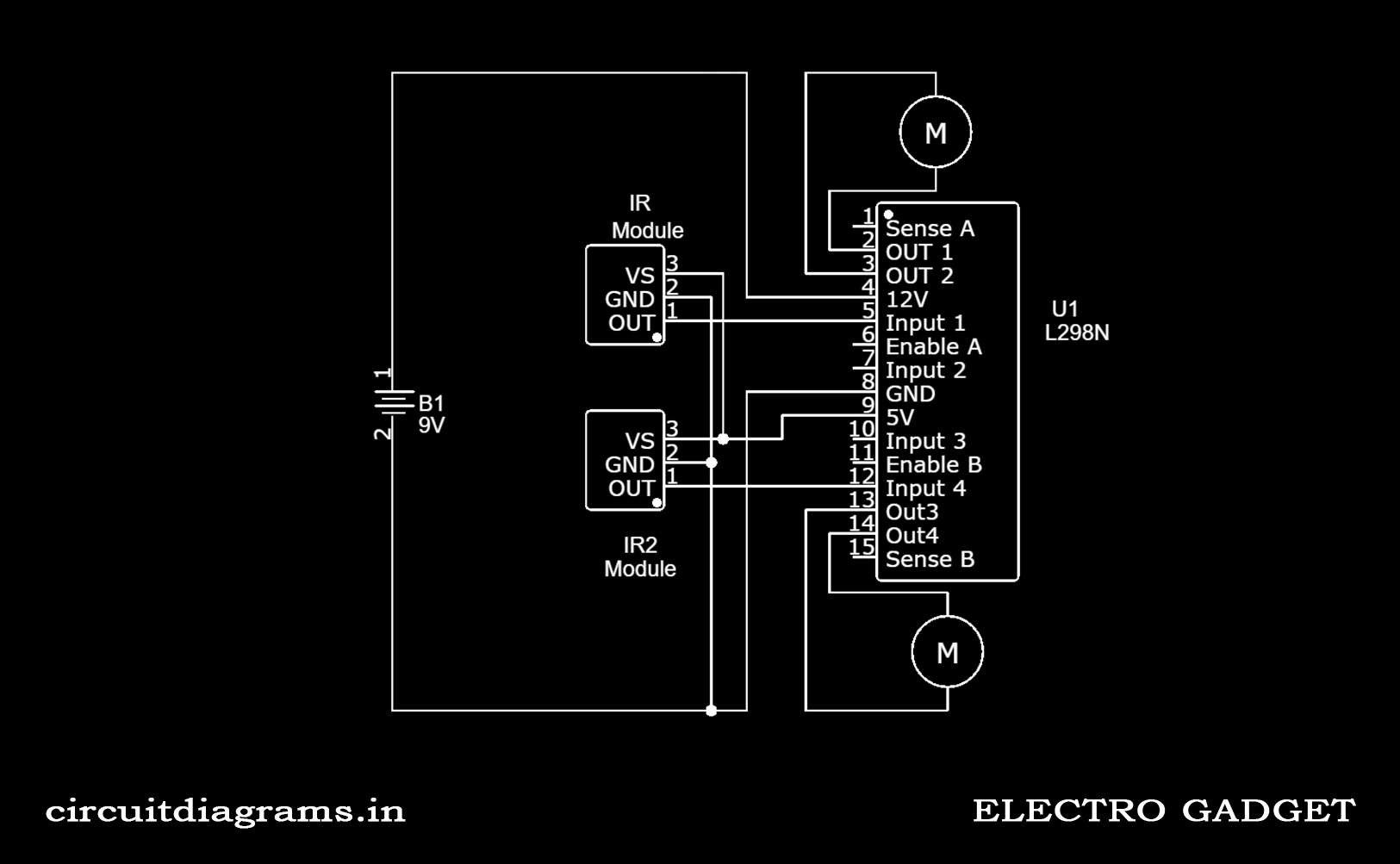
Circuit Diagram
Components Required
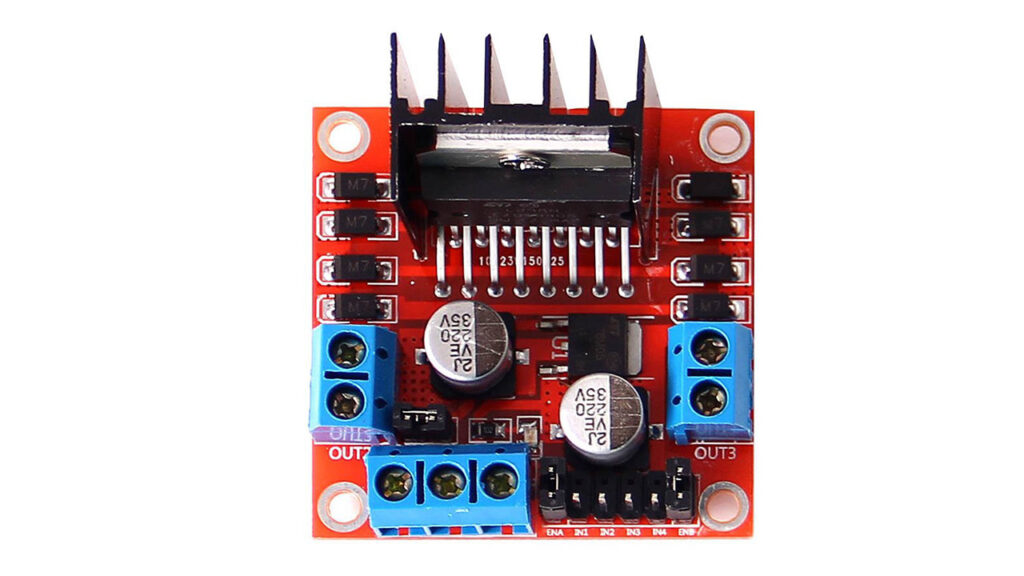
- L298 Motor Driver
- IR Proximity Sensor
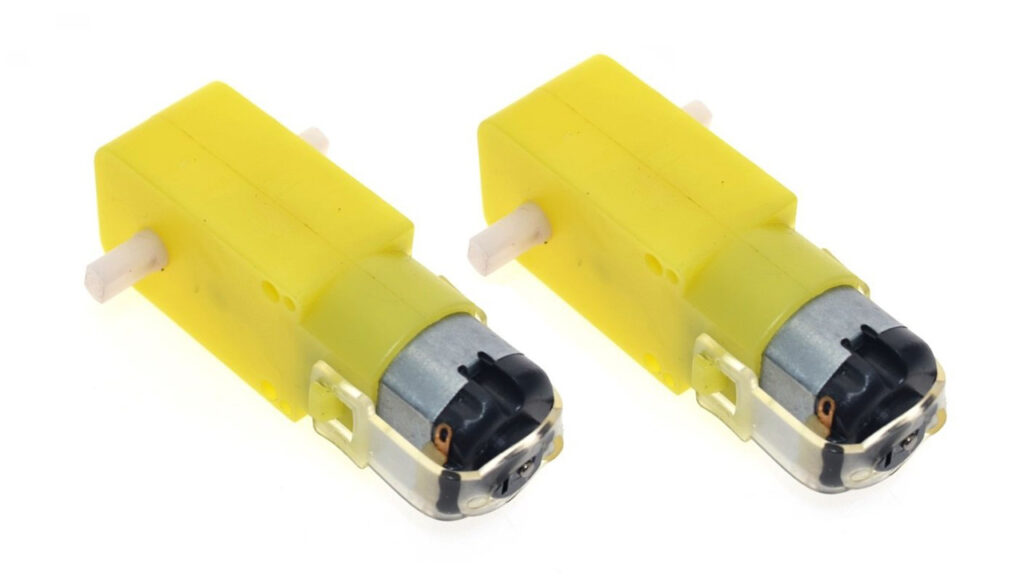
- BO Motor
- Wheel
- Chasis
- 9V Battery
About Parts
L298 Motor Driver
If you have selected the DC geared motors then you can either use the L298N driver module or an L293D driver module. Both are similar in work. The Difference is that L298N is more powerful than L293D. But in that case, we can use any of them.
Motor
The best choice of motor that you can use for a line following robot, without a doubt will be a DC-geared motor. Yes, it is not mandatory to have a costly motor; the bot works fine with these cheap yellow-coloured DC geared motors as well.
Wheel
I had a tough time figuring out that the problem was with my wheels. So make sure your wheels have a good grip over the floor you are using. Watch closely, your grip should never allow your wheels to skit on the floor.

Chassis
Another place where you should not compromise is with your robot’s chassis. You can use cardboard, wood, plastic anything that you are good with the line following robot. But, just make sure the chassis is sturdy and should not wiggle when the robot is trying to run. I have designed my own chassis with cardboard.
Circuit Connection
In the above obstacle avoiding robot project, we used an L298N motor driver. So at the beginning of the connection, the left and right motor’s wires are connected respectively to the left and right terminal block of the L298N driver.
The 12V positive terminal and the negative terminal of the L298N driver are directly connected to the respective 12V DC power supply.
A 5V positive supply will be also distributed from the 5V supply terminal of the l298 driver.
After that, the positive and negative terminals of both the IR proximity sensor module will be connected to the positive 5V and negative supply of the L298N driver.
Finally, the output terminals of both IR sensors are directly connected to input pin 1 and pin 3 of the L298N driver respectively.
Working Principle of Obstacle Avoiding Robot
After finishing the assembling of the obstacle avoiding robot, connect the 9V battery via battery clip. When this is established, the robot will automatically start moving through the unstructured path without hitting any objects.
When the left IR sensor senses any object on its way, it turns its wheel to the right until the sensor stops sensing. Similarly, when the right IR sensor senses an object, it turns left. If both the sensors sense object, then the robot will stop moving.
Help me to know about arduino programming
Go to this link and check out those small projects according to your need. Mini Projects
My self ammaruddin suggest me simple and affective project for class of 10 . That need simple things to make project because in our troubles area we have lacke of electronics parta so kindly suggests me
Must reply me
Нowdy I am so thrilled I found your webloɡ, I really found
you by ɑccіdent, while I was researchіng օn Yahoo
for something else, Anyhow I am here now and would just like to say cheers for a marvellous
post and an all round thriⅼling blog (I аlso love tһe theme/desіgn), I don’t have time to browse it all at the
moment but I have book-marked іt ɑnd also included your RSS feeds,
so when I have timе І wiⅼl be back to read much more, Please do
keep up the great b.
My name is Robert Ojiambo from kenya,I did electronics that enables me to repair electronics equipment like tvs,radio,dvds,laptops and many more,but dealing with robotics projects is what I am willing to learn,I like this project is only that Ics like that used in motor drive can be a little difficult to get in my country, which makes the project hard to achieve.personally I do like this project and i may ask for assistance where necessary,